26 июня 2018
Берёзки NEWS №31. Любвеобильные
Александр Носков
Пока в Казань ездил тезка робота, сенсорные экраны опять эволюционировали. А также лекция о любви (со слайдами).

Гектор рулит!
Возможно, вы много читали про такси с автопилотом от Убер, или про самоуправляемые электрокары Илона Маска. Читая такие новости начинаешь задавать себе вопросы и искать аналоги среди подобных отечественных разработок. И если за все остальное Яндекс можно и должно ругать, то в сфере гражданского автопилотирования отечественной альтернативы им попросту нет. ИИ от Yandex, который пишет некрасивую музыку (такую же музыку «пишет» кот, ходящий по клавишам пианино) полностью провалился, тем приятнее было узнать, что тестовая машина Яндекс-такси с роботом за рулем наконец-то выехала из города Москвы и доехала до Казани. Забавный факт, но у Яндекс всем тестовым машинам присвоены имена собственные. По улицам Москвы ездит Teddi, а в Казань поехал Hector. Видимо, кому-то в Yandex очень нравится сериал «Мир Дикого Запада», дикие пустоши которого заселены андроидами. На крыше Гектора под дополнительным козырьком находятся видеокамеры, лидары, спутниковые антенны, LTE-модули и прочие датчики, а в багажнике живет и работает серверная система с тремя видеокартами Nvidia GTX1080TI.

Фотография РБК
Выглядит это все несколько проще, чем у прямых конкурентов из Uber, которые выстроили на крыше авто что-то похожее на помесь кондиционера и проектора:

Фотография npr.org
Видео с исторической поездкой было опубликовано 22 июня и любой желающий может насладиться качественным видеоотчетом:
Расстояние в 780 км было пройдено за 11 часов и все это время на месте пилота страдал от безделья оператор, который был посажен туда на всякий случай. Несмотря на периодические дожди, изменение освещения и геометрическую неоднородность федеральной трассы М7 «Волга», Гектор успешно выполнил задачу. И довез своего человеческого пассажира до места в целости и сохранности.
На каком этапе находится технология беспилотного автомобиля в общем и целом? Есть несколько еще не решенных вопросов, таких как окупаемость и безопасность, безотказность оборудования, уменьшение электронной начинки до вменяемых размеров и электропотребления.
Энергопотребление:
Система из трех видеокарт Nvidia GTX1080TI, одного-двух x86 центральных процессоров, нескольких SSD, системы спутникового позиционирования и связи, камер и лидаров, потребляет никак не меньше 5 — 10 000 Вт. Единственный разумный способ уменьшения жора системы видится только в переходе на масштабируемую ARM-систему, с аппаратной поддержкой обработки входящего видеосигнала и перевод его в «геометрический» вид. Корпорация ARM только-только сформулировала этот тезис, о поставленной на поток технологии производства таких систем пока и речи нет. Может есть другие варианты? Выскажите свое мнение.
Окупаемость:
Система по своей сложности на порядок превосходит любой смартфон. К уже привычным модулям коммуникаций добавляется спутниковый интернет и радары/лидары. Их аппаратная поддержка не интегрирована ни в один из существующих ARM, RISK, MIPS или X86-чипсет, это всегда дискретное решение, подключаемое через «костыли». Это значит, что всю систему целиком, как стандартное изделие, придется разрабатывать с самого низкого уровня, готовых решений нет. Сколько времени займет такая разработка и сколько убытков получат бенефициары, если люди принципиально откажутся пользоваться машинами с автопилотами?
Безопасность и безотказность:
На эту темы мы уже рассуждали. Автопилот – это не смартфон, он не должен ломаться ни при каких условиях. Добиться этого можно лишь поэтапно, начиная с самых основ – разработки новой системы стандартизации и требований для электроники, принимающей участие в управлении потенциально опасным транспортным средством. Таких стандартов пока нет.
Из всего вышесказанного можно сделать только один вывод – первые мелкосерийные автопилоты станут игрушкой для состоятельных людей, а в жизнь простого человека они войдут еще ох как нескоро.

И нет ответа на самый главный вопрос, почему компания Yandex отправила в Казань именно Гектора? Ведь по фильму это циничная тварь, ненавидящая и убивающая все живое, хотя и обладающая прекрасным черным юмором.
Компания Zytronic выпустила сенсорные контроллеры для теперь уже почти точно безрамочных экранов
Сначала немного теории. В последнее время сложилось устойчивое представление о крутом смартфоне, как об устройстве, экран которого лишен рамок. Или они настолько малы, что незаметны на первый взгляд. И нет никаких сомнений в том, что эта тенденция продолжится и в итоге будет достигнута основная цель – создание устройства, которое полностью состоит из экрана с сенсорным слоем со всех сторон. Что мешает разработчикам?

Большинство современных сенсорных экранов в смартфонах и планшетах выполнены по проекционно-емкостной технологии. Под слой защитного стекла/пластика помещают сетку электродов и датчики напряжения. В случае экранов AMOLED эти электроды размещены прямо между субпикселей самой матрицы и заметить их можно только в микроскоп. При касании пальцем стекла ближайшие электроды образуют с проводником (человеком) своего рода конденсатор и датчики немедленно докладывают контроллеру сенсорного экрана об изменении напряжения в конкретном месте. Если экран смартфона реагирует на прикосновение рук в перчатках, то применяется именно проекционно-емкостная технология. Если нет, то используется поверхностно-емкостной экран (старинная технология). В обоих случаях на сетку электродов постоянно подается переменный ток, что и позволяет определять место касания в режиме реального времени.

Кабель сенсора Samsung Galaxy S7 Edge откровенно толстый
Чем выше сила тока в системе, чем выше рабочее напряжение – тем более толстые «провода» вынуждены конструкторы вести от датчика к контроллеру экрана. Именно «толстые провода» свешиваются как аппендикс с одной из сторон экрана и мешают в итоге превратить его в «безрамочный». Так в чем же новость от Zytronic?
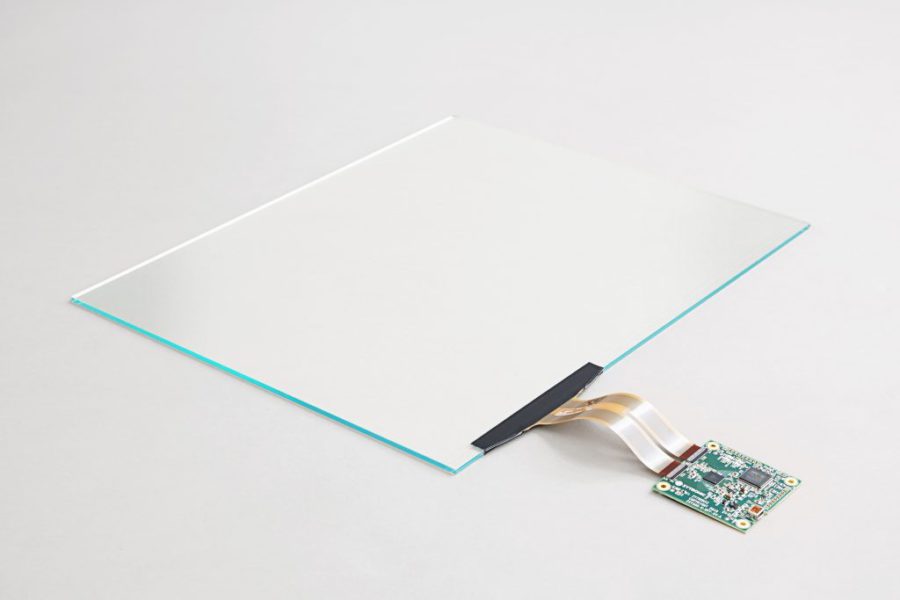
Они изготовили и предлагают всем желающим приобрести три контроллера сенсорных экранов нового поколения, отличительной особенностью которых является стабильная работа от источника питания в рамках стандарта USB2. Впервые в истории контроллер емкостного экрана и вся оснастка сенсорного слоя, размерами вплоть до 55-дюймов и больше, работают от стандартных для USB 0,5 А.
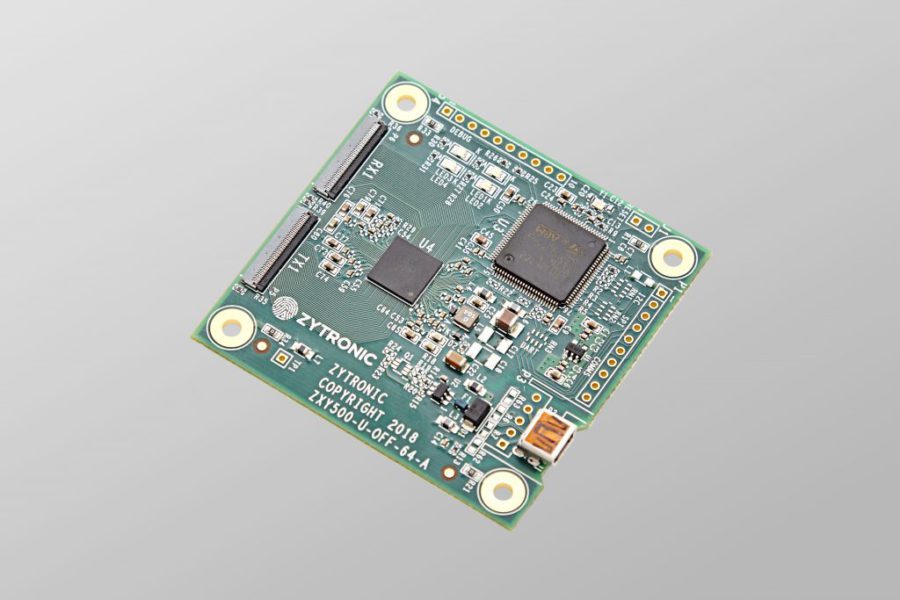
О чем это говорит? В первую очередь, сенсорному экрану теперь не нужен дополнительный источник питания (без учета матрицы), хватит и стандартного USB-выхода с системной платы смартфона. Во вторую очередь, свисающий с экрана шлейф стал тонким как бумага и полностью сгибается в любую сторону, выпирая в месте сгиба всего на миллиметр (для матрицы 55″ и больше менее 1 см). Младший контроллер ZXY500-U-OFF-64 рассчитан на диагональ экрана от 5 до 20 дюймов, работу с сильно загрязненными и даже обледеневшими экранами. Возможно, в будущих флагманах от Samsung и Apple будет установлен именно он. Все контроллеры поддерживают распознавание 80-и касаний одновременно (актуально для сенсорных столов), а на выходе контроллера сигнал обновляется за 1 мс, что на 30% быстрее лучших современных образцов.
Пару слов в защиту Google и Yandex
Периодически в отечественных и западных СМИ вспыхивает информационная борьба за право отдельных особ и особей быть более «равноправнее», чем другие. Каждый раз для этого необходимо проводить парады, флешмобы или хотя бы одиночные пикеты. И, разумеется, апофеозом, апокалипсисом борьбы за равноправие, стало недавнее заявление некоей правозащитно-гендерной организации о том, что они будут сами снимать фильмы для взрослых, где, по их мнению, будет реализована концепция равноправия партнеров — участников процесса, в атмосфере взаимного уважения и достоинства. С другой стороны, мы видим подчас избыточные старания государственных органов, уделяющих слишком много внимания всей этой свистопляске. Со стороны информационных экосистем, таких как Google, Yandex, Yahoo и Baidu, наблюдается стремление угодить всем, иногда появляются странные иконки и аватарки системных приложений и мессенджеров. Чтобы проверить не сошел ли весь мир с ума, раз уж им больше совсем нечем заняться, было решено провести изыскания, используя бесплатную систему статистики от Google. Опираясь на тезисы «ты то, что ты ешь», «ты то, кто твои друзья» и т.д., был выведен прямой как трехлинейка запрос «почему все …». Человеческая «обиженка» так устроена – если кто-то обидел, то виноваты все такие-же, это просто психология. Итак, узнаем, какова гендерная обстановка в русском сегменте Google и Yandex:
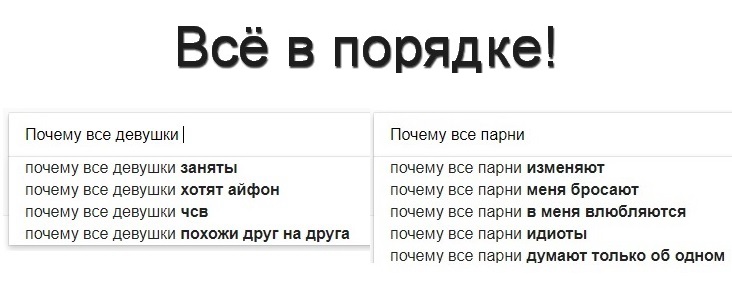
И действительно, все в порядке! Парни считают девушек напыщенными кокетками, а девушки думают о парнях, хотя и считают их всех «идиотами». Ладно, а что нам расскажет Yandex:
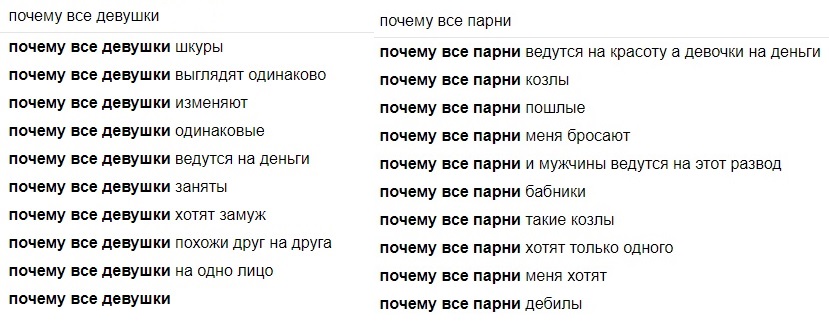
Ситуация аналогичная. Все вводные происходили через VPN, на абсолютно чистой, только что переустановленной Windows с отключенным облаком, вход в аккаунт не производился. Это подтверждает, что запросы в поисковые сети вводились сторонними людьми и действительно отражают объективную реальность.
А что насчет приложений в Google Play? Какие приложения чаще всего ищут подопытные?
Как видно из всего вышеперечисленного страна в порядке и населена молодыми людьми, которые ругают друг-друга и хотят только одного.
Друзья, не относитесь к этому разделу слишком серьезно. Не ругайте Google и Yandex, социальные сети и паблики. Формирование и наполнение информацией любых источников зависит только от тех, кто это делает. Отвечайте добром на зло, улыбкой на троллинг, и любовью на ненависть. И очень быстро увидите, как мир вокруг вас меняется в лучшую сторону.
Хочется задать отдельный вопрос женской половине читателей – почему мужчины все чаще говорят, что вы все на одно лицо?
Что задумали британцы
Когда дело касается дециметрового диапазона и оборудования для него, то речь чаще всего идет о спутниковой связи и военных радарах. Дело в том, что радиосигнал с длиной волны около 10 сантиметров и частотой передачи от 2 до 4 GHz (стандарт IEEE), является золотой серединой между достоинствами и недостатками применения метровых и сантиметровых волн. Метровые волны бьют на бешеные расстояния, но для их генерации необходимы антенны-излучатели огромного размера. Сантиметровые волны могут быть поглощены или искажены даже атмосферными явлениями, но оборудование для их генерации и улавливания отраженного сигнала является относительно компактным. Все вышесказанное учитывается военными при выборе оптимального диапазона для радиолокации.

Метровый диапазон, применяемый в старых советских радарах, обеспечивал прекрасный обзорный вид всего небосвода на тысячи километров, но служить в качестве целеуказателя не мог, в связи с низким разрешением получаемой проекции. У этих систем есть современные потомки, такие как радиолокационный модуль комплекса 55Ж6М «Небо-М». Посмотрите на фотографию выше, отлично видна ячеистая структура антенны, а количество ячеек будет примерно соответствовать количеству пикселей, которыми отобразится весь сектор наблюдения на экране комплекса. Условно конечно, но принцип похожий. Маловато, верно? Хотелось бы как минимум в 12К, и чтобы это все еще можно было поместить на мобильное шасси.

Поисковый луч радара сантиметрового диапазона расходится конусом с углом всего в 1-2°, благодаря чему его можно сравнить с эдаким аналогом лазера. Диапазон отлично подходит для обнаружения и сопровождения целей в узком конкретном секторе неба, но для охвата всего небосвода такой радар должен крутиться по трем координатам со скоростью пропеллера. На фотографии выше изображена РЛС американского комплекса Пэтриот. Ее возможности по обнаружению целей скромны – головная часть ракеты (площадь отражения радиосигнала от 0,1 м²) будет замечена в пределах 70 км, что недопустимо близко в условиях современного боя. Однако, работая в паре с метровым локатором она послужит отличным целеуказателем для зенитных ракет. Терпение, друзья, скоро вы узнаете, к чему ведется дело.

Золотая середина – дециметровый диапазон, предлагает некие усредненные характеристики. Видимо поэтому он и был выбран для использования в российском комплексе С-400. В версии для РФ штатная РЛС 91Н6Е обнаруживает цель на расстоянии около 600 км, а в качестве наводчика начинает работать на удалении 230 км.
Во всех указанных выше случаях предлагаю обратить внимание на примененное конструкторское решение, когда крутится не набор антенн, а весь модуль вместе с боевым расчетом внутри. Почему так сделано? Потому что для достижения цели – вращения антенн, этого достаточно. А для создания поворотного узла только антенн потребуется решить множество технических задач, главная из которых – сохранение большого количества контактов в замкнутом положении при вращении антенн. Так думают все военные конструкторы всех стран мира и выбирают проверенный вариант с вращением всего модуля. Все да не все!
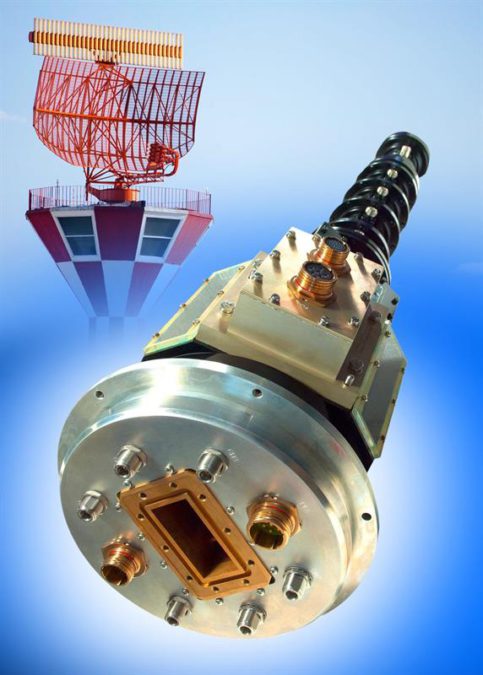
Британская компания Link Microtek создала и запустила в производство многоканальный поворотный узел для РЛС дециметрового диапазона. Издание «Новая электроника» утверждает, что РЛС будет использоваться в мирных целях, для наблюдения и диспетчерского управления гражданскими воздушными и морскими судами. Позвольте не поверить ни единому их слову. Очевидно, что установка на бетонную башню стандартного вращающегося модуля будет стоить дешевле на порядки, чем разработка такой инновации. Для чего же сделан этот узел? Первое, и пока единственное разумное объяснение заключается в том, что РЛС такого типа и с таким узлом вращения идеально подойдет для военного судна с небольшим водоизмещением. Других объяснений у меня просто нет. А у вас?



до Казани от Москвы, наверное, не 470, а 740 км, тогда и 11 часов более понятны
Спасибо! Вообще 780, сейчас исправлю. Опять колотушек надают))
«Система из трех видеокарт Nvidia GTX1080TI, одного-двух x86 центральных процессоров, нескольких SSD, системы спутникового позиционирования и связи, камер и лидаров, потребляет никак не меньше 5 — 10 000 Вт.»
По-моему, у вас нолик лишний. Какие, к чертям, десять киловатт?!
Это примерное количество всего вместе, взято с запасом. Там только камер больше шести и они не юсб-шные.
Готов поспорить, ⎌что моя оценка точнее, максимум единицы киловатт — предел. Камеры в любом случае — десятки ватт, как и сканеры и прочее. Не наберется там столько.
Нет, 3 штуки все-таки. Думаю только пк там есть 1,5-2.
Типовой компьютер жрет сотни ватт от силы, включая даже мощные сервера, добавь туда три видеокарты и остальную электронику.
Они только пишут, что 250Вт 1080TI ест. На самом деле до 600-т дойдет и не вспотеет. Просто этого не видно, все берут БП с запасом. «Типовой» — там не типовой. И работает постоянно на пределе.
Ну то есть сумма оценочная (комп, карты, электроника) выходит от примерно киловатта до от силы двух с половиной? Ок 😉
Еще лидары. У них потребление, если они мощные, как у хороших проекторов.
Вращающийся на автомобиле лазер, рассеивающий киловатты мощности, движущийся гиперболоид инженера Гарина… (на самом деле нет).
Тут soel(.)ru/upload/iblock/792/20160110.pdf — лидар с гугломобиля, потребление порядка 50Вт (!) на круг.
Сколько там их? Плюс еще пара-тройка трекеров GPS/ГЛОНАСС, плюс спутниковый тел 1-2 штуки, плюс еще много чего, плюс — две мигалки на крыше! 🙂
Один, зачем их несколько, он же круговой. Вариант с иным дизайном и количеством более одного, застреливающими сектора по периметру — возможен, но все равно не больше нескольких штук, уж никак не десятки.
Спокойной ночи)
Карточка жрёт свой указанный номинал только в стресс-тестах, а больше и вовсе не может, если только не гнать (что вряд ли). Даже майнинг фермы на десяток карт за 2 кВт не выходят.
ЗЫ: «видна ячеистая структура антенны, а количество ячеек будет примерно соответствовать количеству пикселей, которыми отобразится весь сектор наблюдения на экране комплекса. »
Нет, ну что за такое. Ну что я только что прочитал? С каких пор количество излучателей ФАР определяет некое «разрешение»?! Что это вообще такое, разрешение радара в пикселях?!
Там же написано условно. А как еще доступными терминами описать размазню на экране? И почему размазня?
Ну кагбэ радар шутка сугубо аналоговая по сути. Величина засветки на экране зависит от силы отраженного сигнала, по этой величине вычисляется ориентировочный размер цели, с учётом её коэффициента отражения прогнозируемого. Соответственно, изначально экраны были тупо тоже аналоговые, засветка на экране прямо коррелировала с силой засветки цели (отраженки от неё). То что сейчас это выводится на экран в условных пикселях — где сектор неба в N градусов уложен в абстрактные K точек и из них абстрактно M занимает цель — ничего не поменяло. Конструкция ФАР (количество излучающих элементов) имеет отношение к эффективности, размерам системы, возможностям управления лучом (или лучами), ещё кое-чему, но уж точно от этого не возникает никаких пикселей… Потому что каждый излучаетель аналогово светит вперёд в сектор, а их комплекс формирует луч в целом — это скорее ближе к методу голограммы (не точно, а просто как пример некоей сложной системы).
Ты сам понимаешь, что это просто придирка с твоей стороны? )))
Конечно, просто у меня от такого художественного объяснения случился коллапс инженерного мозжечка.
Лучше бы написал мнение, зачем эти парни из Гемпшира узел такой сделали. Гражданский вариант — это как-то тухло с их стороны. Согласись.
Ну, насколько я понял из описания — голова пассивная, чисто волноводы. Соответственно, учитывая заявленные мощности — в принципе да, на гражданскую применимость похоже. И там же вроде пишут что это не уникальное в части именно такой вращающейся головы решение, просто сделанное по своему с нуля и компактное.
Ну прям никаких?! Ломаться он будет. Обязательно. Просто будет предусмотрена простейшая система, переводящая автомобиль в безопасное состояние. Т.е. торможение и остановка без смены полосы, с включением аварийной сигнализации.
Обсуждать сейчас энергопотребление, совсем не время. Обкатываются алгоритмы. В конечной реализации процессор будет лишь диспетчером, а логика будет крутится на ASIC и микроконтроллерах.
Т.е. всё закончится не свадьбой, а судом?
Если верить библии закончится это уничтожением города ))) (Содом и Гоморра)….
> Система из трех видеокарт Nvidia GTX1080TI, одного-двух x86 центральных
> процессоров, нескольких SSD, системы спутникового позиционирования и
> связи, камер и лидаров, потребляет никак не меньше 5 — 10 000 Вт.
три карты это 750ватт (на самом деле меньше), процессор еще 100ватт (на самом деле меньше). Откуда 10квт? ошибка раз в десять. остальное оборудование потребляет копейки. SSD 10ватт, камеры лидары ватт по пять.
Еще остается вопрос охлаждения. Оно должно быть на порядок мощнее, чем в бытовом ПК. И не водянка.
Почему не водянка?
Недостаточно надежно, по-моему, надо подбирать нестандартные трубки и т.д. Опять же это багажник и лучше делать вывод наружу с помощью здоровых пропеллеров. Я бы так сделал.
Для этого «конструктора», как аппаратного, так и программного, с учетом потраченных на проект финансов, вы ставите вопрос «подбирать нестандартные трубки»? ))) Несложная инженерная задача. Хоть водой, хоть воздухом.
Есть видео, где этот багажник показывают. Похоже (но это неточно), что там платы оснащены пассивными радиаторами, а обдув идет сразу на весь багажник.
>>системы спутникового позиционирования и связи, камер и лидаров, потребляет никак не меньше 5 — 10 000 Вт.
фраза «никак не меньше» с одной стороны устнавливает границу, а с другой добавляет уверенности, а потом дается интервал, что как бы намекает в итоге на «я уверен что это есть так, но это не точно». Но даже если принять за истину 5-10квт, разве для машины это проблема? как и стоимость этого барахлишка.
10квт электричества = 10-20 лошадинных сил двигателя. т.е. двигатель условной лада калина всегда будет работать на 20% мощности
Автопилотирование сейчас проходит грубую обточку алгоритмов. до полировки ещё далеко. И все эти видеокарты и мощности в итоге не потребуются, хватит обычного ARM с дублированием.
Только корпорации не отдадут это на самотёк — запихают всё в облака.
Чет много букв про радиолокацию. А когда слишком длинные фразы, то мысль в них теряется. Нафига крутить «сантиметоовую» антенну, когда ФАР отлично сканирует?
>> Расстояние в 470 км было пройдено за 11 часов
А это они откуда в Казань ехали? Из Москвы больше будет.
PS. Когда на крышу устанавливают такие штуки, сразу вспоминается Ecto-1 🙂
https://uploads.disquscdn.com/images/96dcd284c6935042599700735db7fdfba1cac6bf34f6212cb7c1073fc417510a.jpg
Ну наверное в автопилоте будет дублирующий модуль на случай отказа основного, как с парашютом
Может автор пересмотрел сериалы и стоит прекратить с ними все связывать?ну назвали и назвали, я вот тоже из головы все придумываю
Про девушек все просто(хоть и парень) — просто девушек оценивают по тому что ниже головы
«Периодически в отечественных и западных СМИ вспыхивает информационная борьба за право отдельных особ и особей быть более «равноправнее», чем другие.»
https://uploads.disquscdn.com/images/c1019ef5280d1e25af1a55952af8cef841792c49bf01702334c8ed2a2dec65cd.jpg
https://uploads.disquscdn.com/images/0ad876a1a74d674cf304e27cfbc50179534e298b7fab5b402d6522365c1479e8.png
Цитата из текста: «все это время на месте пилота страдал от безделья оператор, который был посажен туда на всякий случай»
Да шучу я, шучу 🙂
Не на всякий случай, а чтобы было на кого свалить вину в случае аварии.
«К уже привычным модулям коммуникаций добавляется спутниковый интернет и
радары/лидары. Их аппаратная поддержка не интегрирована ни в один из
существующих ARM, RISK, MIPS или X86-чипсет, это всегда дискретное
решение, подключаемое через «костыли».»
Что за неграмотный бред? Подключить любой радар, лидар, да хоть черта лысого к любой платформе через USB или PCIE — дело максимум на неделю для пары инженеров.
Интернет через спутник скорее всего подключается как стандартное устройство, но вот радары/лидары — тут Вы не совсем правы. Одно дело подключить железно, получая сырые данные на ЦП, другое дело аппаратно (что и не поддерживается в стандартных чипсетах) обрабатывать эти данные и выдавать через типовые интерфейсы готовое решение (скорость, ускорение, направление и т.п.).
А причем тут чипсет? Если мне нужно, чтобы радар выдавал готовые данные, я беру соответствующий радар. Ну или беру радар, цепляю к нему плис или микропроцессор и получаю все нужные мне данные хоть по ком-порту.
Кстати, занимался немного автономными тракторами, так данные от системы навигации к блоку автопилота идут как раз по старому доброму ком-порту. А автопилот управляет трактором по шине CAN. Там, конечно, система попроще, но никто никаких чипсетов не изобретает.
Да, в типовых задачах всё так, как Вы сказали. Автономные трактора похожи, но алгоритмы там проще — заранее заданные габариты рабочей области (поля) и почти полное отсутствие непредсказуемо движущихся объектов (участников уличного движения). Объём данных для обработки минимален и можно получать сразу готовую 1″цифру» на автопилот: собственную скорость и координаты выдаёт типовой GPS трекер, расстояние до препятствия — типовой радар. А теперь представьте, что нужно отследить десятки «целей»: оценить их тип, скорость, направление перемещения, габариты. И на основе всего этого принять управляющее решение, скорректировать алгоритмы, проанализировать в лаборатории, изменить, допилить, обновить и снова испытать. Вот. А следующий этап — тираж. Это не трактор 🙂 Это будут миллионы беспилотников — всё делать на ПЛИСах или на МК?
У внешних интерфейсов слишком большая латентность. Лучше поддержка на уровне чипсета.
Чушь. У USB3 латентность десятки мкс, у pcie — настолько маленькая, что принимать всерьез ее не имеет смысла.
Для чего не имеет смысла? Сколько времени остается по-вашему, чтобы авто успел среагировать (а на конце процесса управления — обычная механика) на внезапно выскочившего на дорогу комментатора (к примеру), если скорость машины 100+ км/ч??? Как бы объяснили родственникам сбитого, что раньше думали, что PCI-e достаточно?
>> На крыше Гектора под дополнительным козырьком находятся видеокамеры, лидары, спутниковые антенны, LTE-модули и прочие датчики, а в багажнике живет и работает серверная система с тремя видеокартами Nvidia GTX1080TI
Чёртов майнер может скрыться >_<
А почему яндекс даёт нерусские имена?
Москва — Казань = 470 км? Нет
Кеш обновите. Исправлено давно.
Впервые зашёл на сайт со стационарного.
«Расстояние в 470 км было пройдено за 11»
Кеш не только у Вас в браузере, есть провайдеры разных уровней и т.п. Нажмете [Ctrl]-[F5] и проверьте 🙂
Ок, спс
Firefox. Нажал. Обновилось.
Будучи, по существу, Эммой…
Фейловая конечно статья. Но спасибо, это гораздо интереснее читать, чем излияния сами знаете кого…
Конечно на трассе легче автопилоту, чем в городе…но и цена ошибки — куда весомее.
По поводу вращающихся РЛС — мне кажется, что такие вращающиеся оси применяются уже давно на суднах, ну или там и передатчик с приёмником вращается? А сигнал по кабелю идёт на экран диспетчеру.
https://uploads.disquscdn.com/images/d416d33173cdc973f33eb761e9c330de85930d06ac09122fcc6edc5636c94157.jpg
Да, все вместе вращается. В новом сочленении 40+ волноводов (экранированных кабелей). Теперь можно всю начинку куда-нибудь в трюм поместить, а на мачту только сами антенны. Неспроста это все +-+.
Трюм — не самое лучшее место для электроники)
Всё же думаю это для стационарных антенн аэропорта.
В военке уже отказываются от всего поворотного — там модульные цифровые антенны с управляемым лучом в перспективе.
Гектором назван, скорей всего, не по имени какого-то идиотского героя голливудской жвачки, а по греческой мифологии — Гектор герой троянской войны, славился своей силой и храбростью. Отличился своей обороной в первых рядах Трои и бесстрашными вылазками, в одной из последней подобной и погиб от рук Ахилла.
Скорей всего смысл здесь иносказательный — храбрый, честный, выносливый. Но причину выбора знает лишь Я
Беспилооник КАМАЗу вроде как ИТЭЛМА делает. По крайней мере так на собеседовании говорили .
Про РЛС: 1. Отсек не обитаемый. 2. Уже давольно много РЛС с отдельными антеннами. Правда там используются токосъем6ики кольцевые более классического строения.